
Источники
- Словарь Брокгауза и Ефрона
- Большая Советская энциклопедия
- Толковый словарь Ожегова
- Малый академический словарь
- Толковый словарь Ушакова
- Толковый словарь Ефремовой
- Большой энциклопедический словарь
- Современная энциклопедия
- Большой англо-русский и русско-английский словарь
- Англо-русский словарь технических терминов
- Русско-английский словарь математических терминов
- Большой французско-русский и русско-французский словарь
- Большой испано-русский и русско-испанский словарь
- Физическая энциклопедия
- Научно-технический энциклопедический словарь
- Энциклопедия Кольера
- Энциклопедический словарь
- Большой энциклопедический политехнический словарь
- Большая политехническая энциклопедия
- Русско-английский политехнический словарь
- Dictionnaire technique russo-italien
- Русско-украинский политехнический словарь
- Русско-украинский политехнический словарь
- Естествознание. Энциклопедический словарь
- Орфографический словарь-справочник
- Словари и энциклопедии на Академике
- Большой Энциклопедический словарь
Поделиться
- Источник: Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
- Источник: Большая советская энциклопедия. — М.: Советская энциклопедия. 1969—1978.
- Источник: Толковый словарь Ожегова. С.И. Ожегов, Н.Ю. Шведова. 1949-1992.
- Источник: Малый академический словарь. — М.: Институт русского языка Академии наук СССР. Евгеньева А. П.. 1957—1984.
- Источник: Толковый словарь Ушакова. Д.Н. Ушаков. 1935-1940.
- Источник: Толковый словарь Ефремовой. Т. Ф. Ефремова. 2000.
- Источник: Большой Энциклопедический словарь. 2000.
- Источник: Современная энциклопедия. 2000.
- Источник: Большой англо-русский и русско-английский словарь
- Источник: Англо-русский словарь технических терминов
- Источник: Русско-английский словарь математических терминов
- Источник: Большой французско-русский и русско-французский словарь
- Источник: Большой испано-русский и русско-испанский словарь
- ГИРОСКОП
-
(от греч. gyros — круг, gyreuo — кружусь, вращаюсь и skopeo — смотрю, наблюдаю), быстро вращающееся симметричное тв. тело, ось вращения к-рого (ось симметрии) может изменять своё направление в пр-ве. Г. обладает рядом интересных св-в, наблюдаемых у вращающихся небесных тел, артиллерийских снарядов, детского волчка, роторов турбин, установленных на судах, и др. На св-вах Г. основаны разнообразные устройства или приборы, широко применяемые в совр. технике.
 .
.
Рис. 1. Волчок: АО — его ось; Р — сила тяжести.
Св-ва Г. проявляются при выполнении двух условий:
1) ось вращения Г. должна иметь возможность изменять своё направление в пр-ве;
2) угл. скорость вращения Г. вокруг своей оси должна быть очень велика по сравнению с той угл. скоростью, к-рую будет иметь сама ось при изменении своего направления.
Простейшим Г. явл. детский волчок, быстро вращающийся вокруг своей оси ОА (рис. 1), к-рая может изменять своё положение в пр-ве, поскольку её конец А не закреплён. У Г., применяемых в технике, свободный поворот оси Г. обеспечивают, закрепляя Г. в рамках (кольцах) 1, 2 карданова подвеса (рис. 2), позволяющего оси А В занять любое положение в пр-ве. Такой Г. имеет три степени свободы: он может совершать три независимых поворота вокруг осей АВ, DE и GK,
 .
.
Рис. 2. Гироскоп в кардановом подвесе. Ротор С, кроме вращения вокруг своей оси АВ, может вместе с рамкой 1 поворачиваться вокруг оси DE u вместе с рамкой 2 — вокруг оси GK; О — центр подвеса, совпадающий с центром тяжести гироскопа.
пересекающихся в центре подвеса О, к-рый остаётся по отношению к основанию неподвижным. Если центр тяжести С Г. совпадает с центром О, то Г. наз. астатическим (уравновешенным), в противном случае — т я ж ё л ы м.
Первое свойство уравновешенного Г. с тремя степенями свободы состоит в том, что его ось стремится устойчиво сохранять в мировом пр-ве приданное ей первоначальное направление. Если эта ось вначале направлена на к.-н. звезду, то при любых перемещениях прибора и случайных толчках она будет продолжать указывать на эту звезду, меняя свою ориентировку относительно осей, связанных с Землёй.
 .
.
Рис. 3. Действие силы Р на гироскоп с вращающимся ротором; ось АВ движется перпендикулярно направлению силы Р.
Второе свойство Г. обнаруживается, когда на его ось (или рамку) начинает действовать сила (или пара сил), стремящаяся привести ось в движение (т. е. создающая вращающий момент относительно центра подвеса). Под действием силы Р, приложенной к концу А оси АВ (рис. 3), Г. будет отклоняться не в сторону действия силы, как это было бы при невращающемся роторе, а в направлении, перпендикулярном к этой силе; в результате Г. вместе с рамкой начнёт вращаться вокруг оси DE, притом не ускоренно, а с пост. угл. скоростью. Это вращение наз. прецессией; оно происходит тем медленнее, чем быстрее вращается вокруг своей оси АВ сам Г. Если в какой-то момент времени действие силы прекратится, то одновременно прекратится прецессия, и ось АВ остановится.
Величина угл. скорости прецессии определяется по ф-ле:
 .
.
где М — момент силы Р относительно центра О, a=LАОЕ, W — угл. скорость собств. вращения Г. вокруг оси
 .
.
Рис. 4. Правило определения направления прецессии: глядя на ротор из точки приложения силы Р, устанавливаем по ходу или против хода часовой стрелки вращается ротор; повернув силу Р вокруг оси АВ на 90° в ту же сторону, получим направление прецессии.
АВ, I — момент инерции Г. относительно той же оси, h=AO — расстояние от точки приложения силы до центра подвеса Г.; второе равенство имеет место, когда сила Р параллельна оси DE (в частности, для тяжёлого Г.). Из ф-лы (*) непосредственно видно, что прецессия происходит тем медленнее, чем больше W, точнее, чем больше величина H=IW, наз. собственным кинетич. моментом Г. Как определяется направление прецессии Г., показано на рис. 4.
Наряду с прецессией ось Г. при действии на неё силы может ещё совершать т. н. нутацию — небольшие, но быстрые (обычно незаметные на глаз) колебания оси около её ср. направления. Размахи этих колебаний у быстро вращающегося Г. очень малы и из-за неизбежного наличия сопротивлений быстро затухают. Это позволяет при решении большинства техн. задач пренебречь нутацией и построить т. н. элем. теорию Г., учитывающую только прецессию, скорость к-рой определяется ф-лой (*). Прецессионное движение можно наблюдать у детского волчка (рис. 5, а), для к-рого роль центра подвеса играет точка опоры О. Если ось такого волчка поставить под углом АОЕ к вертикали и отпустить, то она под действием силы тяжести Р будет отклоняться. не в сторону действия этой силы, т. е. не вниз, а в перпендикулярном к ней направлении и прецессировать вокруг вертикали. Прецессия волчка также сопровождается незаметными на глаз нутац. колебаниями, быстро затухающими из-за сопротивления воздуха.
 .
.
Рис. 5. а — прецессия волчка под действием силы тяжести; б — движение оси волчка при медленном собств. вращении.
Под действием трения о воздух собственное вращение волчка постепенно замедляется, а скорость прецессии со соотв. возрастает. Когда угл. скорость вращения волчка становится меньше определ. величины, он теряет устойчивость и падает. У медленно вращающегося волчка нутац. колебания могут быть довольно заметными и, слагаясь с прецессией, существенно изменить картину движения оси волчка: конец А оси будет описывать ясно видимую волнообразную или петлеобразную кривую, то отклоняясь от вертикали, то приближаясь к ней (рис. 5, б).
Другой пример прецессионного движения даёт артиллерийский снаряд (или пуля). На снаряд при его движении, кроме силы тяжести, действует сила сопротивления (R) воздуха, направленная примерно противоположно скорости центра тяжести снаряда и приложенная выше центра тяжести (рис. 6, а). Невращающийся снаряд под действием этой силы будет кувыркаться, и его полёт станет беспорядочным (рис. 6, б); при этом значительно возрастёт сопротивление движению, уменьшится дальность полёта. Вращающийся же снаряд обладает всеми св-вами Г., и сила сопротивления воздуха вызывает его прецессию вокруг прямой, по к-рой направлена скорость vc (рис. 6, а), т. е. вокруг касательной к траектории центра тяжести снаряда (рис. 6, в); это делает полёт правильным и обеспечивает на нисходящей ветви траектории попадание снаряда в цель головной частью.
 .
.
Рис. 6. а — прецессия артиллерийского снаряда; б и в — схемы движения снарядов и их траектории: для невращающегося снаряда (б) и для вращающегося (в).
Наша планета также явл. гигантским Г., совершающим как прецессию, так и нутацию.
Если ось АВ ротора Г. закрепить в одной рамке, к-рая может вращаться по отношению к основанию прибора вокруг оси DE (рис. 7), то Г. будет иметь возможность участвовать только в двух вращениях — вокруг осей А В и DE, т. е. будет иметь две степени свободы. Такой Г. не обладает ни одним из св-в Г. с тремя степенями свободы, однако у него есть другое
 .
.
Рис. 7. Гироскоп с двумя степенями свободы.
св-во: если основанию Г. сообщить вынужденное вращение с угл. скоростью со вокруг оси KL, образующей угол а с осью АВ, то со стороны ротора на подшипники А и В начнёт действовать пара сил с моментом Mгир = /IWwsina. Эта пара сил стремится кратчайшим путём установить ось ротора Г. параллельно оси KL, причём так, чтобы и вращение ротора, и вынужденное вращение были видны происходящими в одну и ту же сторону.
Если ось АВ ротора закреплена в основании D (рис. 8) и это основание неподвижно, то ось не может изменять своё направление в пр-ве, и, следовательно, ротор никакими св-вами Г. не обладает. Однако если вращать основание вокруг нек-рой оси KL с угл. скоростью w, то по предыду щему правилу ось ротора будет давить на подшипники А и В с силами F1 и F2, наз. гироскопическими силами.
 .
.
Рис. 8. Действие гироскопич. сил на подшипники, закрепляющие ось, при повороте основания прибора вокруг оси KL.
На морских судах и винтовых самолётах имеется много вращающихся частей: вал двигателя, ротор турбины или динамомашины, гребные или возд. винты и т. п. При разворотах самолёта или судна, а также при качке на подшипники, в которых укреплены эти вращающиеся части, действуют указанные гироскопические силы, и их необходимо учитывать при соответствующих инженерных расчётах.
Теория Г. явл. важнейшим разделом динамики тв. тела, имеющего неподвижную точку. Перечисленные св-ва Г. представляют собой следствия законов, к-рым подчиняется движение такого тела. Первое из св-в Г. с тремя степенями свободы — проявление закона сохранения кинетич. момента, а второе св-во — проявление одной из теорем динамики, согласно к-рой происходящее с течением времени изменение кинетического момента тела равно моменту действующей на него силы.
Гироскопы в технике. Применяемые в технике Г. выполняют обычно в виде маховичка с утолщённым ободом, имеющего массу от неск. г до десятков кг и закреплённого в кардановом подвесе. Чтобы сообщить Г. быстрое вращение, его часто делают ротором быстроходного электромотора пост. или перем. тока. В авиации применяются Г. с ротором в виде возд. турбинки, приводимой в движение струёй воздуха. Иногда Г. выполняют в форме шара (шар-Г.) с подвесом на возд. плёнке, образуемой потоком сжатого воздуха; воздушные (газовые) опоры могут также применяться в осях подвеса ротора и кардановых колец. В ряде устройств используют поплавковый Г., ротор к-рого заключён в кожух, плавающий в жидкости; этим разгружаются подшипники кожуха и значительно уменьшается момент сил трения в них. Кроме того, Г. с жидкостными или поплавковыми подвесами мало подвержены случайным вибрационным, ударным и др. воздействиям, что повышает их точность. Используются также Г. с магнитными и электростатическими подвесами.
В технике применяется много различных гироскопических устройств, или приборов, основанных на использовании тех или иных св-в Г. с тремя или двумя степенями свободы. В них в кач-ве осн. элементов входят один или неск. Г., а также нек-рые вспомогат. приспособления для корректирования направления оси Г. или измерения углов её отклонения и т. д. Эти устройства применяют в авиации, морском флоте, ракетной и косм. технике и народном хозяйстве для решения разнообразных навигац. задач, для управления подвижными объектами, их стабилизации, а также при проведении нек-рых спец. работ (маркшейдерских, топографич., геодезич. и др.).
Важнейшими навигац. устройствами явл. гирокомпас и гировертикаль (гирогоризонт). Гирокомпас, указывающий направление истинного (геогр.) меридиана, предназначается для определения курса движущегося объекта, а также азимута ориентируемого направления; его важные преимущества перед магн. компасом состоят в том, что он указывает истинный, а не магнитный меридиан, и что на его показания не влияют перемещающиеся металлич. массы и эл.-магн. поля. Гировертикаль определяет направление истинной вертикали или плоскости горизонта, а также отклонения движущегося объекта от этой плоскости (углы бортовой и килевой качки корабля, углы тангажа и крена летат. аппарата). К навигац. устройствам также относятся: Г. направления, определяющие углы отклонения в горизонт. плоскости объекта от заданного направления (углы рыскания летат. аппарата или корабля), в частности авиац. указатель поворота; гиромагн. компасы, определяющие магн. курс объекта; гирошироты, к-рые служат для определения широты места; инерциальные навигац. системы, предназначенные для определения целого ряда параметров, необходимых для навигации данного объекта без использования внеш. сигналов; гироорбитанты, определяющие углы рыскания ИСЗ; автопилоты и гирорулевые, обеспечивающие автоматическое управление соотв. полётом летательного аппарата или курсом корабля, и др.
Большое число устройств, наз. гиростабилизаторами, служит для стабилизации объекта или отд. приборов и устройств, а также для определения угл. отклонений объекта. Они применяются для автоматич. управления движением самолётов, судов, торпед, ракет, для уменьшения качки судов и для др. целей. Различают системы индикаторной и силовой стабилизации. Индикаторная система содержит в кач-ве индикатора Г., регистрирующий отклонение объекта от заданного курса, и следящую силовую систему, к-рая улавливает сигнал об отклонении, усиливает его и передаёт силовому устройству (мотору), возвращающему объект на заданный курс, обычно с помощью рулей. В силовой системе стабилизация непосредственно осуществляется массивным Г.
Ряд гироскопич. устройств, в к-рых используются т. н. дифференцирующие и интегрирующие Г., служит для определения угл. скоростей объекта (гиротахометры) или его угл. ускорений (гироакселерометры) и углов поворота, а также линейных скоростей объекта. К последним относится гироскопич. интегратор ускорений, позволяющий определить в любой момент времени скорость ракеты при её ускоренном движении на нач. участке траектории.
Совр. техника требует от мн. гироскопич. устройств очень высокой точности, что вызывает большие технол. трудности при их изготовлении. Напр., у нек-рых приборов при массе ротора порядка 1 кг для обеспечения нужной точности смещения центра тяжести от центра подвеса не должны превышать долей микрона, иначе момент силы тяжести вызовет нежелат. прецессию (уход) оси Г. Кроме того, на точность показаний приборов с Г. в кардановом подвесе влияет трение в осях. Всё это привело к разработке Г., основанных на др. физ. принципах. Напр., для определения угл. скорости объекта может применяться вибрац. Г., содержащий в кач-ве чувствит. элемента не вращающийся ротор, а вибрирующие детали, или лазерный, Г., в к-ром используется квант. генератор.
- Источник: Физическая энциклопедия
- Источник: Научно-технический энциклопедический словарь
- Источник: Энциклопедия Кольера
- Источник: Энциклопедический словарь
- Источник: Большой энциклопедический политехнический словарь
- Источник: Большая политехническая энциклопедия
- Источник: Русско-английский политехнический словарь
- Источник: Dictionnaire technique russo-italien
- Источник: Русско-украинский политехнический словарь
- Источник: Русско-украинский политехнический словарь
- Источник: Естествознание. Энциклопедический словарь
- Источник:
- Источник:
- Источник:
Словарь Брокгауза и Ефрона
(Gyroskope). Под гироскопом подразумевается прибор, в состав которого входит так называемый tore, или, по-русски, волчок, состоящий из оси (обыкновенно стальной), на которую насажено (обыкновенно латунное, иногда железное) тело вращения. Мы будем называть гироскопом сам tore, а приборы, его заключающие, будем называть гироскопическими приборами. Г., будучи приведен во вращение вокруг оси симметрии, имеет стремление сохранить направление своей оси неизменным в пространстве; это стремление тем более, чем больше угловая скорость вращения (см. "Вращательное движение") и чем более момент инерции (см.) Г. вокруг оси симметрии.
Черт. 1.
Чтобы при той же массе придать Г. по возможности больший момент инерции, телу его дают вид кольца, окаймляющего диск (см. черт. 1, где Г. изображен в разрезе через ось), или конуса (см. черт. 2-й).
Черт. 2.
В середине диска или в вершине конуса сделано утолщение с отверстием, в которое вставляется ось, припаиваемая к стенкам отверстия. Центр тяжести Г., изображенного на черт. 1-м, находится на середине его оси, оконечности которой заострены. Этими остроконечиями ось вставляется в конические углубления, находящиеся на концах винтов, ввинченных в кольцо D (см. черт. 3-й).
Черт. 3.
Кольцо это составляет часть Карданова подвеса, состоящего из кольца ВВ, прикрепленного к подставке А, кольца СС, могущего вращаться вокруг вертикальной оси bb и кольца DD, могущего вращаться в кольце СС вокруг оси сс, перпендикулярной к bb; ось ее, вокруг которой вращается Г. в кольце DD, перпендикулярна к оси сс. Весь прибор, изображенный на черт. 3-м, называется Боненбергеровым гироскопическим прибором. Если сообщить Г., с помощью шнурка, быстрое вращение вокруг оси симметрии, то направление этой оси остается неизменным, какое бы положение ни было придано кольцу BB с подставкою А. Такая неизменяемость направления оси объясняется свойством инерции и неизменяемостью расстояний частиц тела Г. от его оси. Когда к вращающемуся Г. будет приложена пара сил, принуждающая его повернуться вокруг оси перпендикулярной к оси симметрии, то он действительно станет поворачиваться, но только вокруг третьей оси, перпендикулярной к первым двум. Для объяснения этого обстоятельства, представим себе, что Г. состоит из оси AB (черт. 4-й) и неизменно связанной с нею материальной окружности CDEF, заменяющей кольцо.
Черт. 4.
При вращении по инерции все точки окружности будут иметь равные скорости, направленные по касательной к окружности; так, точки С, D, Е, F будут иметь скорости Cc, Dd Ее, Ff.
Посмотрим, как должны измениться скорости точек окружности, при переходе оси из положения ВА в положение В1А1(означенное на черт. 4-м прерывною прямой), составляющее с первоначальным весьма малый угол; на такой же угол повернется и окружность, придя в положение C1DE1F, и все точки ее, за исключением точек С и Е, должны изменить направления своих скоростей. Скорость С1с1параллельна скорости Сс и скорость Е1е1параллельна скорости Ее; скорость точки D должна получить направление Dd1, а для этого необходимо, чтобы к скорости Dd была присоединена скорость Dp, которая, соединяясь по правилу параллелограмма со скоростью Dd, образует вместе с нею составную скорость Dd1; точно так же к скорости Ff должна быть придана скорость Fq, чтобы образовалась скорость Ff, касательная к окружности FC1D. Величины добавочных скоростей Dp и Fq должны быть равны vΔφ, где Δφ есть весьма малый угол АОА1, а v — величина скорости Dd; если R есть радиус окружности, a ω угловая скорость Г., то v = Rω. Добавочная скорость какой-нибудь точки т полуокружности EDC должна быть направлена параллельно Dp и должна быть меньше ее в отношении mk:R, где mk есть расстояние точки т от оси ОС; добавочные скорости точек полуокружности EFC должны быть направлены параллельно Fq. Для сообщения этих добавочных скоростей надо приложить к точкам полуокружности EDC силы, направленные параллельно ОА, а к точкам полуокружности EFC — силы, направленные параллельно OB. Величины этих сил должны быть таковы, чтобы точка D получила ускорения v(dφ/dt), точка m — ускорение меньшее ускорения точки D в отношении mk:R. Вся совокупность этих сил может быть заменена парою сил (см.), ось которой имеет направление ОС и момент которой равен Jω(dφ/dt), где J есть момент инерции Г. вокруг ВА. Две силы, образующие эту пару, можно приложить к каким-либо точкам Г., напр. к оконечностям А и В его оси; на черт. 4-м изображены две равные и противоположные силы Аα и Bß, образующие пару сил, стремящуюся повернуть Г. вокруг оси ОС слева направо. Если какая-либо точка оси вращающегося Г. будет неподвижна, а к другой точке оси будет приложена сила, момент которой вокруг неподвижной точки будет направлен параллельно оси ОС, то вращающийся Г. начнет поворачиваться вокруг оси параллельной OD слева направо с угловою скоростью dφ/dt, равной L:Jω, где L есть величина момента приложенной силы вокруг неподвижной точки.
Такое свойство вращающегося Г. демонстрируется с помощью гироскопических приборов Фесселя и Фуко. Прибор Фесселя описывается во многих курсах физики; здесь ограничимся описанием прибора Фуко. Он состоит из Г., вращающегося внутри кольца. На наружной поверхности кольца приделан крючок, за который привязана нить, как изображено на черт. 5-м; верхний конец этой нити прикрепляется к неподвижной точке.
Черт. 5.
Когда гироскопу будет сообщено быстрое вращение вокруг его оси симметрии, а затем весь снаряд будет приведен в положение, изображенное на рисунке, и пущен свободно, то вместо того, чтобы опуститься вниз под влиянием силы тяжести, он станет вращаться вокруг вертикальной нити. Еще лучше, если вместо обыкновенного крючка будет прикреплен к кольцу прямоугольный крючок, оканчивающийся острием, которым снаряд будет опираться в дно маленькой чашечки, находящейся на вершине вертикального стержня, прикрепленного к неподвижной подставке. Если M есть масса снаряда, l — расстояние центра тяжести его от острия крючка и g ускорение силы тяжести, то момент веса снаряда вокруг неподвижной точки будет Mgl, если ось Г. будет горизонтальна, и Mglsinα — если ось составляет с отвесной линией угол α. Под влиянием такого клонящего момента угловая скорость вращения снаряда вокруг вертикальной оси будет:
Mglsinα/Jω,
то есть тем менее, чем более угловая скорость ω вращения Г. вокруг его оси симметрии. По мере уменьшения этой угловой скорости (вследствие сопротивлений), ось Г. будет наклоняться все более и более, а вместе с тем угловая скорость снаряда вокруг вертикальной оси будет все более и более увеличиваться.
Д. Б.
Большая Советская энциклопедия
(от Гиро... и ...скоп)
быстро вращающееся твёрдое тело, ось вращения которого может изменять своё направление в пространстве. Г. обладает рядом интересных свойств, наблюдаемых у вращающихся небесных тел, у артиллерийских снарядов, у детского волчка, у роторов турбин, установленных на судах, и др. На свойствах Г. основаны разнообразные устройства или приборы, широко применяемые в современной технике для автоматического управления движением самолётов, морских судов, ракет, торпед и др. объектов, для определения горизонта или географического меридиана, для измерения поступательных или угловых скоростей движущихся объектов (например, ракет) и многое др.
Свойства Г. проявляются при выполнении двух условий: 1) ось вращения Г. должна иметь возможность изменять своё направление в пространстве; 2) угловая скорость вращения Г. вокруг своей оси должна быть очень велика по сравнению с той угловой скоростью, которую будет иметь сама ось при изменении своего направления.
Простейшим Г. является детский волчок, быстро вращающийся вокруг своей оси ОА (рис. 1); ось ОА может изменять своё положение в пространстве, поскольку её конец А не закреплен. У Г., применяемых в технике, свободный поворот оси Г. можно обеспечить, закрепив сё в рамках (кольцах) 1, 2 т. н. карданова подвеса (рис. 2), позволяющего оси АВзанять любое положение в пространстве. Такой Г. имеет 3 степени свободы: он может совершать 3 независимых поворота вокруг осей АВ, DE и GK, пересекающихся в центре подвеса О, который остаётся по отношению к основанию 3неподвижным. Если центр тяжести Г. совпадает с центром О, то Г. называется астатическим (уравновешенным), в противном случае — тяжёлым.
Первое свойство уравновешенного Г. с тремя степенями свободы состоит в том, что его ось стремится устойчиво сохранять в мировом пространстве приданное ей первоначальное направление. Если эта ось вначале направлена на какую-нибудь звезду, то при любых перемещениях основания прибора и случайных толчках она будет продолжать указывать на эту звезду, меняя свою ориентировку относительно земных осей. Впервые это свойство Г. использовал французский учёный Л. Фуко для экспериментального доказательства вращения Земли вокруг её оси (1852). Отсюда и само название «Г.», что в переводе означает «наблюдать вращение».
Второе свойство Г. обнаруживается, когда на его ось (или рамку) начинают действовать сила или пара сил, стремящиеся привести ось в движение (т. е. создающие вращающий момент относительно центра подвеса). Под действием силы Р (рис. 3) конец А оси АВГ. будет отклонять не в сторону действия силы, как это было бы при невращающемся роторе, а в направлении, перпендикулярном к этой силе; в результате Г. вместе с рамкой 1 начнёт вращаться вокруг оси DE, притом не ускоренно, а с постоянной угловой скоростью. Это вращение называется прецессией; оно происходит тем медленнее, чем быстрее вращается вокруг своей оси АВ сам Г. Если в какой-то момент времени действие силы прекратится, то одновременно прекратится прецессия и ось АВ мгновенно остановится, т. е. прецессионное движение Г. безынерционно.
Величина угловой скорости прецессии определяется по формуле:
где М — момент силы Рцентра О, α = 〈АОЕ, Ω — угловая скорость собственного вращения Г. вокруг оси АВ, I — момент инерции Г. относительно той же оси, h = АО— расстояние от точки приложения силы до центра подвеса Г.; второе равенство имеет место, когда сила Р параллельна оси DE. Из формулы (1) непосредственно видно, что прецессия происходит тем медленнее, чем больше Ω, точнее, чем больше величина H = IΩ, называется собственным кинетическим моментом Г. Как найти направление прецессии Г. см. рис. 4.
Наряду с прецессией ось Г. при действии на неё силы может ещё совершать т. н. нутацию — небольшие, но быстрые (обычно незаметные на глаз) колебания оси около её среднего направления. Размахи этих колебаний у быстро вращающегося Г. очень малы и из-за неизбежного наличия сопротивлений быстро затухают. Это позволяет при решении большинства технических задач пренебречь нутацией и построить т. н. элементарную теорию Г., учитывающую только прецессию, скорость которой определяется формулой (1). Прецессионное движение можно наблюдать у детского волчка (рис. 5, а), для которого роль центра подвеса играет точка опоры О. Если ось такого волчка поставить под углом АОЕ к вертикали и отпустить, то она под действием силы тяжести Р будет отклоняться не в сторону действия этой силы, т. е. не вниз, а в перпендикулярном направлении, и начинает прецессировать вокруг вертикали. Прецессия волчка также сопровождается незаметными на глаз нутационными колебаниями, быстро затухающими из-за сопротивления воздуха. Под действием трения о воздух собственное вращение волчка постепенно замедляется, а скорость прецессии ω соответственно возрастает. Когда угловая скорость вращения волчка становится меньше определенной величины, он теряет устойчивость и падает. У медленно вращающегося волчка нутационные колебания могут быть довольно заметными и, слагаясь с прецессией, существенно изменить картину движения оси волчка: конец А оси будет описывать ясно видимую волнообразную или петлеобразную кривую, то отклоняясь от вертикали, то приближаясь к ней (рис. 5, б).
Другой пример прецессионного движения даёт артиллерийский снаряд (или пуля). На снаряд при его движении, кроме силы тяжести, действуют силы сопротивления воздуха, равнодействующая R которых направлена примерно противоположно скорости центра тяжести снаряда и приложена выше центра тяжести (рис. 6, а). Невращающийся снаряд под действием силы сопротивления воздуха будет «кувыркаться» и его полёт станет беспорядочным (рис. 6, б); при этом значительно возрастет сопротивление движению, уменьшится дальность полёта и снаряд не попадёт в цель головной частью. Вращающийся же снаряд обладает всеми свойствами Г., и сила сопротивления воздуха вызывает отклонение его оси не в сторону действия этой силы, а в перпендикулярном направлении. В результате ось снаряда медленно прецессирует вокруг прямой, по которой направлена скорость vc, т. е. вокруг касательной к траектории центра тяжести снаряда (рис. 6, в), что делает полёт правильным и обеспечивает на нисходящей ветви траектории попадание снаряда в цель головной частью.
Наша планета Земля также является гигантским Г., совершающим прецессию (подробнее см. Прецессия в астрономии).
Если ось АВ ротора Г. закрепить в одной рамке, которая может вращаться по отношению к основанию прибора вокруг оси DE (рис. 7), то Г. будет иметь возможность участвовать только в двух вращениях — вокруг осей АВ и DE, т. е. будет иметь две степени свободы. Такой Г. не обладает ни одним из свойств Г. с тремя степенями свободы, однако у него есть другое очень интересное свойство: если основанию Г. сообщить вынужденное вращение с угловой скоростью ω вокруг оси KL, образующей угол α с осью АВ, то на ось ротора со стороны подшипников А и В начнёт действовать пара сил с гироскопическим моментом
Мгир = IΩω sin α. (2)
Эта пара стремится кратчайшим путём установить ось ротора Г. параллельно оси KL, причём так, чтобы и вращение ротора, и вынужденное вращение были видны происходящими в одну и ту же сторону.
Рассмотрим, наконец, ротор, ось АВкоторого непосредственно закреплена в основании D (рис. 8). Если это основание неподвижно, то ось не может изменять своё направление в пространстве и, следовательно, ротор никакими свойствами Г. не обладает. Однако если вращать основание вокруг некоторой оси KL с угловой скоростью ω, то по предыдущему правилу ось АВ будет стремиться установиться параллельно оси KL. Этому движению препятствуют подшипники, в которых закреплена ось. В результате ротор будет давить на подшипники А и В с силами F1и F2, называемыми гироскопическими силами.
На морских судах и винтовых самолётах имеется много вращающихся частей: вал двигателя, ротор турбины или динамомашины, гребные или воздушные винты и т.п. При разворотах самолёта или судна, а также при качке на подшипники, в которых укреплены эти вращающиеся части, действуют указанные гироскопические силы и их необходимо учитывать при соответствующих инженерных расчётах; величины этих сил могут достигать нескольких тонн, и, если крепления подшипников не будут должным образом рассчитаны, то произойдёт авария.
Теория Г. является важнейшим разделом динамики (См. Динамика) твёрдого тела, имеющего неподвижную точку. Перечисленные свойства Г. представляют собой следствия законов, которым подчиняется движение такого тела. Первое из свойств Г. с тремя степенями свободы есть проявление закона сохранения кинетического момента, а второе свойство — проявление одной из теорем динамики, согласно которой изменение во времени кинетического момента тела равно моменту действующей на него силы.
Гироскопы в технике. Применяемые в технике Г. выполняют обычно в виде маховичка с утолщённым ободом, весом от нескольких Г до десятков кГ, закрепленного в кардановом подвесе. Чтобы сообщить Г. быстрое вращение, его делают ротором быстроходного электромотора постоянного или переменного тока. В авиации применяются Г. с ротором в виде воздушной турбинки, приводимой в движение струей воздуха. Иногда Г. выполняют в форме шара (шар-Г.) с подвесом на воздушной плёнке, образуемой подачей сжатого воздуха. В ряде конструкций применяют поплавковый Г., ротор которого заключён в кожух, плавающий в жидкости; этим разгружаются подшипники кожуха и значительно уменьшается момент трения в них.
Устройство конкретных гироскопических приборов основывается на тех или иных свойствах Г. с тремя или двумя степенями свободы. Свойство Г. с тремя степенями свободы неизменно сохранять направление своей оси в пространстве используется при конструировании приборов для автоматического управления движением самолётов (например, Автопилота), ракет, морских судов, торпед и т.п. Г. в этих приборах играет роль чувствительного элемента, регистрирующего отклонение движущегося объекта от заданного курса. Одновременно прибор содержит следящую систему, улавливающую сигнал об отклонении, усиливающую его и передающую силовому устройству (мотору), которое и возвращает объект на заданный курс, обычно с помощью рулей. Второе свойство Г. с тремя степенями свободы — свойство прецессировать под действием приложенной силы — положено в основу Г. направления (курсового Г.) и важных навигационных приборов: Гирокомпаса — прибора, определяющего направление географического меридиана, и гировертикали (или гирогоризонта) — прибора, определяющего направление истинной вертикали (горизонта).
При запуске ракеты необходимо с высокой степенью точности знать скорость её вертикального взлёта. С этой, казалось бы, очень трудной задачей, тоже легко справляется прецессирующий Г.
В гироскопических приборах часто используют и свойства Г. с двумя степенями свободы. К таким приборам относятся авиационный Указатель поворота, а также некоторые виды Гиростабилизаторов, в частности устройства для пространственной стабилизации объекта (например, искусственного спутника Земли). Подробнее о всех этих и др. устройствах см. Гироскопические устройства.
Современная техника требует от многих гироскопических приборов очень высокой точности, что вызывает большие технологические трудности при их изготовлении. Например, у некоторых приборов при весе ротора порядка 1 кГ для обеспечения нужной точности смещение центра тяжести от центра подвеса не должно превышать долей микрона, иначе момент силы тяжести вызовет нежелательную прецессию (уход) оси Г. Кроме того, на точность показаний приборов с Г. в кардановом подвесе влияет трение в осях. Всё это привело к разработке Г., основанных не на чисто механических, а на других физических принципах (см. также Квантовый гироскоп, Вибрационный гироскоп).
Лит.: Николаи Е. Л., Гироскоп и некоторые его технические применения, М. — Л., 1947 (популярное изложение); Граммель Р., Гироскоп, его теория и применения, пер. с нем., т. 1—2, М., 1952; Булгаков Б. В., Прикладная теория гироскопов, 2 изд., М., 1955; Ишлинский А. Ю., Механика гироскопических систем, М., 1963.
С. М. Тарг.
Рис. 1. Волчок; ОА — его ось, Р — сила тяжести.
Рис. 2. Гироскоп в кардановом подвесе. Ротор С, кроме вращения вокруг своей оси АВ, может вместе с рамкой 1 поворачиваться вокруг оси DE и вместе с рамкой 2 — вокруг оси GK; следовательно, ось ротора может занять любое положение в пространстве. О — центр подвеса, совпадающий с центром тяжести гироскопа.
Рис. 3. Действие силы Р на гироскоп с вращающимся ротором; ось АВ движется перпендикулярно направлению Р.
Рис. 4. Правило определения направления прецессии: глядя на ротор из точки приложения силы Р, надо установить, как вращается ротор — по ходу или против хода часовой стрелки. После этого мысленно повернуть вектор АР вокруг оси АВ на 90° в ту же сторону (т. е. по ходу или против хода часовой стрелки соответственно); тогда он и укажет направление прецессии (здесь — AD).
Рис. 5. а — прецессия волчка под действием силы тяжести; б — движение оси волчка при медленном собственном вращении.
Рис. 6. а — прецессия артиллерийского снаряда; б и в — схемы движения снарядов и их траектории соответственно; б — для невращающегося снаряда; в — для вращающегося.
Рис. 7. Гироскоп с двумя степенями свободы.
Рис. 8. Действие гироскопических сил на подшипники, закрепляющие ось, при повороте основания прибора вокруг оси KL.
Толковый словарь Ожегова
ГИРОСКО́П, -а, муж. Используемый для автоматического регулирования устойчивости прибор с диском и свободной осью, всегда сохраняющей неизменное положение.
| прил. гироскопический, -ая, -ое и гироскопный, -ая, -ое.
Малый академический словарь
-а, м.
Свободно подвешенное, быстро вращающееся тело (волчок), ось вращения которого может изменять свое положение в пространстве, но благодаря быстрому вращению сохраняет неизменное направление при любых изменениях положения подвеса.
[От греч. γυ̃ρος — круг, кольцо и σκοπέω — наблюдаю]
Толковый словарь Ушакова
ГИРОСКО́П и жироскоп, гироскопа, муж. (от греч. gyros - круглый и skopeo - смотрю) (спец.). Прибор в виде вращающегося на вертикально стоящей оси тела, служащий для поддерживания в состоянии равновесия каких-нибудь предметов. Волчок устроен по принципу гироскопа. Вагоны однорельсовой дороги сохраняют равновесие благодаря установленному в них гироскопу.
Толковый словарь Ефремовой
м.; = жироско́п
Прибор, основной частью которого является вращающееся тело (диск), ось вращения которого может изменять свое положение в пространстве, но благодаря быстрому вращению сохраняет неизменное направление при любых изменениях положения подвеса.
Большой энциклопедический словарь
ГИРОСКОП (от гиро... и скоп) - твердое тело, быстро вращающееся вокруг имеющейся у него оси вращения. При этом ось вращения гироскопа должна иметь возможность свободно поворачиваться в пространстве, для чего гироскоп обычно закрепляют в т. н. кардановом подвесе (рис.). Основное Свойство гироскопа с 3 степенями свободы состоит в том, что его ось устойчиво сохраняет приданное ей первоначальное направление (напр., на какую-нибудь звезду). Если же на такой гироскоп начинает действовать сила, то его ось отклоняется не в сторону действия силы, а в направлении, перпендикулярном к ней; в результате гироскоп начинает прецессировать (см. Прецессия). Свойство гироскопа широко используется в различных навигационных приборах - гирокомпасе, гировертикали и др., а также для стабилизации движения самолетов (автопилот), ракет, морских судов, торпед и др.
Современная энциклопедия
ГИРОСКОП (от греческого gyros - круг, gyreuo - кружусь, вращаюсь и ...скоп), твердое тело, быстро вращающееся вокруг одной из своих осей симметрии (так называемой оси гироскопа), которая не закреплена и может изменять свое направление в пространстве лишь под действием внешних сил. Примерами гироскопа являются большинство планет, роторы электрических машин и турбин, артиллерийские снаряды, детские волчки и др. Основное свойство гироскопа - способность сохранять устойчивость направления оси гироскопа - широко используется для целей авиа- и морской навигации (гирокомпас, гирогоризонт), а также для стабилизации движения (например, уменьшение качки корабля гиростабилизаторами) и автоматического управления движением (автопилот). Гироскопическая устойчивость оси вращения Земли играет большую роль в геофизических, климатологических и метеорологических процессах.
Большой англо-русский и русско-английский словарь
муж. gyroscopeм. gyroscope;
~ический gyroscopic.
Англо-русский словарь технических терминов
gyroscope
Русско-английский словарь математических терминов
m.gyroscope, gyro
Большой французско-русский и русско-французский словарь
м.
gyroscope m
Большой испано-русский и русско-испанский словарь
м.
giróscopo m
Физическая энциклопедия
Научно-технический энциклопедический словарь
ГИРОСКОП, симметричный вращающийся диск, который может подстроиться под любое направление; прикреплен к кардановому шарниру (паре колец, свободно движущихся один в другом). Когда гироскоп вращается, изменение направления карданового шарнира не меняет направления вращающегося колеса. Это значит, что изменение направления самолета или корабля можно измерить, имея гироскоп на борту, не прибегая к помощи извне. Гиростабилизатор фиксирует крен самолета или качку корабля. Гирокомпас - это гироскоп, приспособленный для выполнения функций компаса. Когда вращающийся момент (сила вращения) приложен к быстро вращающемуся гироскопу, он отклоняет его от вертикальной позиции, и таким образом возникает феномен, называемый ПРЕЦЕССИЕЙ. Гироскоп вращается вокруг неподвижной точки на оси вращения, описывая конус вокруг вертикальной линии. Свойство противостоять изменениям в оси вращения частично является причиной того, почему можно удержать равновесие на велосипеде, почему находятся на орбитах звезды и планеты.

Гироскоп. Создание гиро скопа важный вклад в науку об измерениях. Его действие основано на быстром вращений колеса с тяжелым ободом, которое подвешено так, что вращается почти без трения, в комбинации кардановых шарниров, которые позволяют ему вращаться на оси в любой плоскости. Если толчок вращения совершается с одинаковой скоростью (например, в элек фическом мошре), то ось колеса сохраняет положение, которое было принято при первом вращении Так как Земля вращается, ось продолжает сохранять определенное положение в пространстве, хотя шарниры карданов меняют угол по отношению к ней. Первоначально гироскоп применялся для прицеливания орудий в море и для рулевого управления торпед.
Энциклопедия Кольера
навигационный прибор, основным элементом которого является быстро вращающийся ротор, закрепленный так, что ось его вращения может поворачиваться. Три степени свободы (оси возможного вращения) ротора гироскопа обеспечиваются двумя рамками карданова подвеса. Если на такое устройство не действуют внешние возмущения, то ось собственного вращения ротора сохраняет постоянное направление в пространстве. Если же на него действует момент внешней силы, стремящийся повернуть ось собственного вращения, то она начинает вращаться не вокруг направления момента, а вокруг оси, перпендикулярной ему (прецессия).

Рис. 1. ГИРОСКОП С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ (с двумя рамками карданова подвеса), кинематическая схема. Iy - ось собственного вращения ротора, вдоль которой направлен его кинетический момент; I0 - опорное направление кинетического момента; j - угол отклонения внутренней рамки карданова подвеса; wj - угловая скорость поворота внутренней рамки подвеса (прецессия); Mq - момент возмущающей внешней силы; wq - угловая скорость поворота внешней рамки подвеса (нутация).
В хорошо сбалансированном (астатическом) и достаточно быстро вращающемся гироскопе, установленном на высокосовершенных подшипниках с незначительным трением, момент внешних сил практически отсутствует, так что гироскоп долго сохраняет почти неизменной свою ориентацию в пространстве. Поэтому он может указывать угол поворота основания, на котором закреплен. Именно так французский физик Ж. Фуко (1819-1868) впервые наглядно продемонстрировал вращение Земли. Если же поворот оси гироскопа ограничить пружиной, то при соответствующей установке его, скажем, на летательном аппарате, выполняющем разворот, гироскоп будет деформировать пружину, пока не уравновесится момент внешней силы. В этом случае сила сжатия или растяжения пружины пропорциональна угловой скорости движения летательного аппарата. Таков принцип действия авиационного указателя поворота и многих других гироскопических приборов. Поскольку трение в подшипниках очень мало, для поддержания вращения ротора гироскопа не требуется много энергии. Для приведения его во вращение и для поддержания вращения обычно бывает достаточно маломощного электродвигателя или струи сжатого воздуха.
Применение. Гироскоп чаще всего применяется как чувствительный элемент указывающих гироскопических приборов и как датчик угла поворота или угловой скорости для устройств автоматического управления. В некоторых случаях, например в гиростабилизаторах, гироскопы используются как генераторы момента силы или энергии.
См. также МАХОВИК. Основные области применения гироскопов - судоходство, авиация и космонавтика (см. ИНЕРЦИАЛЬНАЯ НАВИГАЦИЯ). Почти каждое морское судно дальнего плавания снабжено гирокомпасом для ручного или автоматического управления судном, некоторые оборудованы гиростабилизаторами. В системах управления огнем корабельной артиллерии много дополнительных гироскопов, обеспечивающих стабильную систему отсчета или измеряющих угловые скорости. Без гироскопов невозможно автоматическое управление торпедами. Самолеты и вертолеты оборудуются гироскопическими приборами, которые дают надежную информацию для систем стабилизации и навигации. К таким приборам относятся авиагоризонт, гировертикаль, гироскопический указатель крена и поворота. Гироскопы могут быть как указывающими приборами, так и датчиками автопилота. На многих самолетах предусматриваются гиростабилизированные магнитные компасы и другое оборудование - навигационные визиры, фотоаппараты с гироскопом, гиросекстанты. В военной авиации гироскопы применяются также в прицелах воздушной стрельбы и бомбометания. Гироскопы разного назначения (навигационные, силовые) выпускаются разных типоразмеров в зависимости от условий работы и требуемой точности. В гироскопических приборах диаметр ротора составляет 4-20 см, причем меньшее значение относится к авиационно-космическим приборам. Диаметры же роторов судовых гиростабилизаторов измеряются метрами.
ОСНОВНЫЕ ПОНЯТИЯ
Гироскопический эффект создается той же самой центробежной силой, которая действует на юлу, вращающуюся, например, на столе. В точке опоры юлы о стол возникают сила и момент, под действием которых ось вращения юлы отклоняется от вертикали, а центробежная сила вращающейся массы, препятствуя изменению ориентации плоскости вращения, вынуждает юлу вращаться и вокруг вертикали, сохраняя тем самым заданную ориентацию в пространстве. Таким вращением, называемым прецессией, ротор гироскопа отвечает на приложенный момент силы относительно оси, перпендикулярной оси его собственного вращения. Вклад масс ротора в этот эффект пропорционален квадрату расстояния до оси вращения, поскольку чем больше радиус, тем больше, во-первых, линейное ускорение и, во-вторых, плечо центробежной силы. Влияние массы и ее распределения в роторе характеризуется его "моментом инерции", т.е. результатом суммирования произведений всех составляющих его масс на квадрат расстояния до оси вращения. Полный же гироскопический эффект вращающегося ротора определяется его "кинетическим моментом", т.е. произведением угловой скорости (в радианах в секунду) на момент инерции относительно оси собственного вращения ротора. Кинетический момент - векторная величина, имеющая не только численное значение, но и направление. На рис. 1 кинетический момент представлен стрелкой (длина которой пропорциональна величине момента), направленной вдоль оси вращения в соответствии с "правилом буравчика": туда, куда подается буравчик, если его поворачивать в направлении вращения ротора. Прецессия и момент силы тоже характеризуются векторными величинами. Направление вектора угловой скорости прецессии и вектора момента силы связано правилом буравчика с соответствующим направлением вращения.
См. также ВЕКТОР.
ГИРОСКОП С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ
На рис. 1 дана упрощенная кинематическая схема гироскопа с тремя степенями свободы (тремя осями вращения), причем направления вращения на ней показаны изогнутыми стрелками. Кинетический момент представлен жирной прямой стрелкой, направленной вдоль оси собственного вращения ротора. Момент силы прикладывается нажатием пальца так, что он имеет составляющую, перпендикулярную оси собственного вращения ротора (вторую силу пары создают вертикальные полуоси, закрепленные в оправе, которая связана с основанием). Согласно законам Ньютона, такой момент силы должен создавать кинетический момент, совпадающий с ним по направлению и пропорциональный его величине. Поскольку же кинетический момент (связанный с собственным вращением ротора) фиксирован по величине (заданием постоянной угловой скорости посредством, скажем, электродвигателя), это требование законов Ньютона может быть выполнено только за счет поворота оси вращения (в сторону вектора внешнего момента силы), приводящего к увеличению проекции кинетического момента на эту ось. Этот поворот и есть прецессия, о которой говорилось ранее. Скорость прецессии возрастает с увеличением внешнего момента силы и убывает с увеличением кинетического момента ротора.
Гироскопический указатель курса. На рис. 2 показан пример применения трехстепенного гироскопа в авиационном указателе курса (гирополукомпасе). Вращение ротора в шарикоподшипниках создается и поддерживается струей сжатого воздуха, направленной на рифленую поверхность обода. Внутренняя и наружная рамки карданова подвеса обеспечивают полную свободу вращения оси собственного вращения ротора. По шкале азимута, прикрепленной к наружной рамке, можно ввести любое значение азимута, выровняв ось собственного вращения ротора с основанием прибора. Трение в подшипниках столь незначительно, что после того как это значение азимута введено, ось вращения ротора сохраняет заданное положение в пространстве, и, пользуясь стрелкой, скрепленной с основанием, по шкале азимута можно контролировать поворот самолета. Показания поворота не обнаруживают никаких отклонений, если не считать эффектов дрейфа, связанных с несовершенствами механизма, и не требуют связи с внешними (например, наземными) средствами навигации.

Рис. 2. АВИАЦИОННЫЙ ГИРОУКАЗАТЕЛЬ КУРСА с воздушным приводом. Пример применения трехстепенного гироскопа. Арретир служит для удержания оси собственного вращения ротора в горизонтальном положении при вводе азимута по шкале. 1 - основание; 2 - зубчатое колесо синхронизатора; 3 - ручка арретира; 4 - арретир; 5 - шкала азимута; 6 - воздушное сопло; 7 - наружная рамка; 8 - ротор; 9 - корпус; 10 - полуось наружной рамки с фиксаторной гайкой; 11 - внутренняя рамка.
ДВУХСТЕПЕННЫЙ ГИРОСКОП
Во многих гироскопических приборах используется упрощенный, двухстепенный вариант гироскопа, в котором наружная рамка трехстепенного гироскопа устранена, а полуоси внутренней закрепляются непосредственно в стенках корпуса, жестко связанного с движущимся объектом. Если в таком устройстве единственная рамка ничем не ограничена, то момент внешней силы относительно оси, связанной с корпусом и перпендикулярной оси рамки, заставит ось собственного вращения ротора непрерывно прецессировать в сторону от этого первоначального направления. Прецессия будет продолжаться до тех пор, пока ось собственного вращения не окажется параллельной направлению момента силы, т.е. в положении, при котором гироскопический эффект отсутствует. На практике такая возможность исключается благодаря тому, что задаются условия, при которых поворот рамки относительно корпуса не выходит за пределы малого угла. Если прецессия ограничивается только инерционной реакцией рамки с ротором, то угол поворота рамки в любой момент времени определяется проинтегрированным ускоряющим моментом. Поскольку момент инерции рамки обычно сравнительно мал, она слишком быстро реагирует на вынужденное вращение. Имеются два способа устранить этот недостаток.
Противодействующая пружина и вязкостный демпфер. Датчик угловой скорости. Прецессию оси вращения ротора в направлении вектора момента силы, направленного вдоль оси, перпендикулярной оси рамки, можно ограничить пружиной и демпфером, воздействующими на ось рамки. Кинематическая схема двухстепенного гироскопа с противодействующей пружиной представлена на рис. 3. Ось вращающегося ротора закреплена в рамке перпендикулярно оси вращения последней относительно корпуса. Входной осью гироскопа называется направление, связанное с основанием, перпендикулярное оси рамки и оси собственного вращения ротора при недеформированной пружине.

Рис. 3. ДВУХСТЕПЕННЫЙ ГИРОСКОП с противодействующей пружиной, вязкостным демпфером и стрелочным индикатором угловой скорости (вязкостный демпфер служит только для успокоения колебаний). 1 - корпус; 2 - пружины; 3 - вязкостный демпфер; 4 - рамка; 5 - ротор; 6 - указатель выходного угла рамки j.
Момент внешней силы относительно опорной оси вращения ротора, приложенный к основанию в тот момент времени, когда основание не вращается в инерциальном пространстве и, следовательно, ось вращения ротора совпадает со своим опорным направлением, заставляет ось вращения ротора прецессировать в сторону входной оси, так что угол отклонения рамки начинает увеличиваться. Это эквивалентно приложению момента силы к противодействующей пружине, в чем состоит важная функция ротора, который в ответ на возникновение входного момента силы создает момент силы относительно выходной оси (рис. 3). При постоянной входной угловой скорости выходной момент силы гироскопа продолжает деформировать пружину, пока создаваемый ею момент силы, воздействующий на рамку, не заставит ось вращения ротора прецессировать вокруг входной оси. Когда скорость такой прецессии, вызванной моментом, создаваемым пружиной, сравняется с входной угловой скоростью, достигается равновесие и угол рамки перестает изменяться. Таким образом, угол отклонения рамки гироскопа (рис. 3), указываемый стрелкой на шкале, позволяет судить о направлении и угловой скорости поворота движущегося объекта. На рис. 4 показаны основные элементы указателя (датчика) угловой скорости, ставшего в настоящее время одним из самых обычных авиакосмических приборов.

Рис. 4. УКАЗАТЕЛЬ УГЛОВОЙ СКОРОСТИ - авиационный прибор с двухстепенным гироскопом. 1 - регулировка противодействующей пружины; 2 - ось собственного вращения ротора; 3 - рамка; 4 - корпус; 5 - ротор; 6 - воздушное сопло; 7 - турбинный обод ротора; 8 - демпфер рамки; 9 - стрелка; 10 - шкала; 11 - указывающая система; 12 - противодействующая пружина.
Вязкостное демпфирование. Для гашения выходного момента силы относительно оси двухстепенного гироузла можно использовать вязкостное демпфирование. Кинематическая схема такого устройства представлена на рис. 5; она отличается от схемы на рис. 4 тем, что здесь нет противодействующей пружины, а вязкостный демпфер увеличен. Когда такое устройство поворачивается с постоянной угловой скоростью вокруг входной оси, выходной момент гироузла заставляет рамку прецессировать вокруг выходной оси. За вычетом эффектов инерционной реакции (с инерцией рамки связано в основном лишь некоторое запаздывание отклика) этот момент уравновешивается моментом сил вязкостного сопротивления, создаваемым демпфером. Момент демпфера пропорционален угловой скорости вращения рамки относительно корпуса, так что выходной момент гироузла тоже пропорционален этой угловой скорости. Поскольку этот выходной момент пропорционален входной угловой скорости (при малых выходных углах рамки), выходной угол рамки увеличивается по мере того, как корпус поворачивается вокруг входной оси. Стрелка, движущаяся по шкале (рис. 5), указывает угол поворота рамки. Показания пропорциональны интегралу угловой скорости вращения относительно входной оси в инерциальном пространстве, и поэтому устройство, схема которого представлена на рис. 5, называется интегрирующим двухстепенным гиродатчиком.

Рис. 5. ВЯЗКОСТНОЕ ДЕМПФИРОВАНИЕ двухстепенного гироскопа. Прибор реагирует на поворот корпуса относительно входной оси. 1 - вязкостный демпфер; 2 - рамка; 3 - корпус; 4 - ротор; 5 - указатель выходного угла рамки.
На рис. 6 изображен интегрирующий гиродатчик, ротор (гиромотор) которого заключен в герметично запаянный стакан, плавающий в демпфирующей жидкости. Сигнал угла поворота плавающей рамки относительно корпуса вырабатывается индукционным датчиком угла. Положение поплавкового гироузла в корпусе задает датчик момента в соответствии с поступающими на него электрическими сигналами. Интегрирующие гиродатчики обычно устанавливают на элементах, снабженных сервоприводом и управляемых выходными сигналами гироскопа. При таком расположении выходной сигнал датчика момента можно использовать как команду на поворот объекта в инерциальном пространстве.
См. также ГИРОКОМПАС.

Рис. 6. ИНТЕГРИРУЮЩИЙ ГИРОДАТЧИК двухстепенного типа. Пространство между стаканом поплавка и корпусом заполнено жидкостью. 1 - корпус; 2 - балансировочные гайки; 3 - балансировочные вилки; 4 - подшипник рамки; 5 - якорь датчика момента; 6 - статор датчика момента; 7 - стакан поплавкового гироузла; 8 - гиромотор; 9 - демпферный зазор; 10 - рамка; 11 - индукционный датчик угла; 12 - подшипник рамки.
ЛИТЕРАТУРА
Ригли У., Холлистер У., Денхард У. Теория, проектирование и испытания гироскопов. М., 1972 Бабаева Н.Ф. Гироскопы. Л., 1973 Поплавский М.А. Теория гироскопов. Киев, 1986
Энциклопедический словарь
ГИРОСКО́П -а; м. [от греч. gyros - круг, кольцо и skopeō - смотрю, наблюдаю]. Свободно подвешенное, быстро вращающееся тело (волчок), ось вращения которого может изменять своё положение в пространстве, но благодаря быстрому вращению сохраняет неизменное направление при любых изменениях положения подвеса. Г. ориентации. Курсовый, квантовый г.
◁ Гироскопи́ческий, -ая, -ое. Г-ие приборы. Г. компас (=гироко́мпас).
* * *
гироско́п(от гиро... и …скоп), быстровращающееся симметричное твёрдое тело, ось вращения (ось симметрии) которого может изменять своё направление в пространстве, для чего гироскоп обычно закрепляют в так называемом кардановом подвесе. Основное свойство гироскопа с 3 степенями свободы состоит в том, что его ось устойчиво сохраняет приданное ей первоначальное направление относительно инерциальной системы отсчёта. Если же на такой гироскоп начинает действовать сила, то его ось отклоняется не в сторону действия силы, а в направлении, перпендикулярном к ней; в результате гироскоп начинает прецессировать (см Прецессия). Свойство гироскопа широко используется в различных навигационных приборах — гирокомпасе, гировертикали и др., а также для стабилизации движения самолётов (автопилот), ракет, морских судов, торпед и др.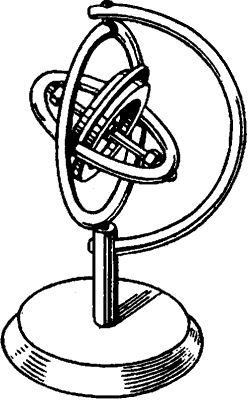
* * *
ГИРОСКОПГИРОСКО́П (от гиро...(см. ГИРО... (часть сложных слов)) и греч. skopeo — смотрю), твердое тело, быстро вращающееся вокруг имеющейся у него оси вращения. При этом ось вращения гироскопа должна иметь возможность свободно поворачиваться в пространстве, для чего гироскоп обычно закрепляют в кардановом подвесе.
Основное свойство гироскопа с 3 степенями свободы состоит в том, что его ось устойчиво сохраняет приданное ей первоначальное направление (напр., на какую-нибудь звезду). Если же на такой гироскоп начинает действовать сила, то его ось отклоняется не в сторону действия силы, а в направлении, перпендикулярном к ней; в результате гироскоп начинает прецессировать (см. Прецессия(см. ПРЕЦЕССИЯ)). Свойство гироскопа широко используется в различных навигационных приборах — гирокомпасе, гировертикали и др., а также для стабилизации движения самолетов (автопилот), ракет, морских судов, торпед.
Большой энциклопедический политехнический словарь
(от гиро... и... скоп) - быстро вращающееся твёрдое тело, ось вращения к-рого может изменять своё направление в пространстве (см. рис.). Простейший Г. - волчок. В гироскопических приборах в качестве Г. обычно применяют ротор быстроходного электродвигателя пост. или перем. тока, статор к-рого укреплён в кожухе, являющемся внутр. кольцом карданова подвеса, обеспечивающего 3 степени свободы Г. Если центр тяжести Г. совпадает с центром подвеса, то Г. ваз. астатическим (уравновешенным), в противном случае - тяжёлым. Астатич. Г., свободный от внеш. воздействий, устойчиво сохраняет первонач. направление своей оси. Под действием внеш. сил, момент к-рых относительно точки подвеса Г. отличен от 0, происходит прецессия Г.

Гироскоп в кардановом подвесе. Ротор С, кроме вращения вокруг своей оси АВ, может вместе с рамкой 1 поворачиваться вокруг оси DE и вместе с рамкой 2 - вокруг оси КG; О - центр подвеса, совпадающий с центром тяжести гироскопа
Большая политехническая энциклопедия
ГИРОСКОП — механическое устройство с несколькими степенями свободы (3 или 2) в виде кардана (см.) и быстро вращающегося в нём тяжёлого диска (ротора), при этом ось вращения диска стремится сохранить неизменным своё положение в пространстве при любых поворотах и перемещениях устройства благодаря прецессии (см.). На свойстве Г. прецессировать под действием внешнего возмущения (см.), приложенного к их оси, основано действие авиагоризонта (см.), автопилота (см.) и др. навигационных и пилотажных приборов. Г. применяют в контрольно-измерительных, регулирующих и стабилизирующих устройствах (на судах, торпедах, ракетах, самолётах, а также в ряде других технических устройств).
Русско-английский политехнический словарь
gyroscope
* * *
гироско́п м.gyro(scope)
аррети́ровать гироско́п — cage a gyro
вводи́ть гироско́п в меридиа́н — settle a gyro on the meridian, align a gyro to the meridian
восстана́вливать гироско́п — erect a gyro, bring a gyro to the vertical
гироско́п враща́ется — the gyro(scope) spins
второ́е сво́йство гироско́па — (gyroscope) precession
гироско́п вхо́дит в меридиа́н — the gyro settles on the meridian
выверя́ть гироско́п по фикси́рованному ориенти́ру — align a gyro against a fixed marker
гироско́п зава́ливается — the gyro tilts [tumbles]
корректи́ровать гироско́п — position a gyro
пе́рвое сво́йство гироско́па — (gyroscope) rigidity, gyroscopic inertia
гироско́п прецесси́рует — the gyro precesses
приводи́ть гироско́п в де́йствие — spin a gyro
приводи́ть гироско́п к вертика́ли — erect a gyro
гироско́п рабо́тает на вы́беге — the gyro spins by inertia, the gyro coasts [is coasting]
разаррети́ровать гироско́п — uncage a gyro
гироско́п (само)ориентируется на се́вер или юг — the gyro seeks North or South
согласо́вывать гироско́п с пло́скостью меридиа́на — slave a gyro to the meridian
гироско́п стреми́тся сохрани́ть первонача́льное положе́ние [направле́ние] относи́тельно мирово́го простра́нства — the gyro tends to remain rigid in space
уде́рживать гироско́п в пло́скости меридиа́на — slave a gyro to the meridian
астати́ческий гироско́п — balanced gyro
вибрацио́нный гироско́п — vibratory [vibrating] gyro
двухстепенно́й гироско́п — single-degree-of-freedom gyro
демпфи́рующий гироско́п — damping gyro
интегри́рующий гироско́п — integrating gyro, gyro(scopic) integrator
криоге́нный гироско́п — cryogenic gyro
курсово́й гироско́п — heading gyro
ла́зерный гироско́п — laser gyroscope
магнитогидродинами́ческий гироско́п — MHD-gyro
гироско́п направле́ния — directional gyro
несвобо́дный гироско́п — powered gyroscope
одноосево́й гироско́п — single-axis gyroscope
опти́ческий гироско́п — light gyroscope
позицио́нный гироско́п — position gyro
поплавко́вый гироско́п — floated(-type) gyroscope
прецессио́нный гироско́п — rate gyro
гироско́п с ва́куумным при́водом ро́тора — vacuum-driven gyro
светово́й гироско́п — light gyroscope
свобо́дный гироско́п — free [master] gyro
гироско́п с жи́дкостным ро́тором — fluid rotor gyro
силово́й гироско́п — powered gyroscope
симметри́ческий гироско́п — symmetrical gyro
скоростно́й гироско́п — rate gyro
гироско́п с корре́кцией от магни́тного ко́мпаса — compass-controlled [compass-slaved, compass-positioned] gyro
гироско́п с ма́ятниковой корре́кцией — pendulum(-positioned) gyro
трёхстепенно́й гироско́п — two-degree-of-freedom gyro
тяжё́лый гироско́п — heavy gyro
уравнове́шенный гироско́п — balanced gyro
я́дерный гироско́п — nuclear gyro
Dictionnaire technique russo-italien
giroscopio m
гироскоп с электростатическим подвесом — giroscopio elettrostatico
- гироскоп автопилота
- астатический гироскоп- вибрационный гироскоп
- двухстепенный гироскоп
- демпфирующий гироскоп
- дифференцирующий гироскоп
- интегрирующий гироскоп
- гироскоп крена
- курсовой гироскоп
- лазерный гироскоп
- магнитогидродинамический гироскоп
- гироскоп направления
- гироскоп поворота
- поплавковый гироскоп
- прецессионный гироскоп
- свободный гироскоп
- гироскоп с газовым подвесом
- гироскоп с двумя степенями свободы
- гироскоп с жидкостным подвесом
- скоростной гироскоп
- гироскоп с маятниковой коррекцией
- гироскоп с одной степенью свободы
- гироскоп с поплавковым подвесом
- гироскоп тангажа
- уравновешенный гироскоп
- гироскоп Фуко
- ядерный гироскоп
Русско-украинский политехнический словарь
техн.
гіроско́п
- вибрационный гироскоп
- дифференцирующий гироскоп- симметричный гироскоп
- уравновешенный гироскоп
Русско-украинский политехнический словарь
техн.
гіроско́п
- вибрационный гироскоп
- дифференцирующий гироскоп- симметричный гироскоп
- уравновешенный гироскоп
Естествознание. Энциклопедический словарь
(от гиро... и скоп), быстровращающееся симметричное твёрдое тело, ось вращения (ось симметрии) к-рого может изменять своё направление в пространстве, для чего Г. обычно закрепляют в т. н. кардановом подвесе (рис.). Осн. свойство Г. с 3 степенями свободы состоит в том, что его ось устойчиво сохраняет приданное ей первонач. направление относительно инерциальной системы отсчёта. Если же на такой Г. начинает действовать сила, то его ось отклоняется не в сторону действия си-лы, а в направлении, пер-пендикулярном к ней; в результате Г. начинает прецессировать (см. Прецессия). Свойство Г. широко используется в разл. навигац. приборах - гирокомпасе, гировертикали и др., а также для стабилизации движения самолётов (автопилот), ракет, мор. судов, торпед и др.